Technische
Details
Registrierung
Ausrichtung
Datei-Gruppen
Stacking
Stacking Methoden
Drizzle
Kometen Stacking
RAW Bilder Entwicklungsprozess
Registrierung
Sternerkennung
DeepSkyStacker erkennt automatisch in jedem Bild die Sterne.
Um es ganz einfach zu formulieren: Ein Stern ist ein rundes Objekt, dessen Luminanz gleichmäßig nach allen Seiten abnimmt.
Sobald ein Stern entdeckt wird, wird mit Hilfe einer sogenannten Gaußkurve (der Helligkeitsverteilung) das exakte Zentrum des Sterns berechnet.
Verwendung von Darks, Flats und Offsets
vor der Registrierung
Wenn Dark-, Flat- und/oder Offsetframes ausgewählt sind, werden diese noch vor dem eigentlichen Registrierungs-Prozess angewendet.
Wenn sich in den Lightframes viele Hot-Pixel befinden, ist es sehr empfehlenswert Darkframes zu verwenden, da sonst diese "angeblichen" Sterne einen korrekten Ausrichtungsprozess enorm stören.
Automatische Erkennung von Hot-Pixel
Optional dazu (zur Darkframe Verwendung) versucht DeepSkyStacker Hot-Pixel während des Registrierungs-Prozesses zu entdecken und damit "falsche" Sterne zu vermeiden.
Diese Option lässt sich allerdings nur bei monochromen Bildern und RAW Bildern im Super-Pixel,
Bayer.Drizzle, Bilinear und AHD Interpolations-Modus anwenden.
Anpassung des Sternerkennungs-Schwellenwertes
Der Standard Sternerkennungs-Schwellenwert liegt normalerweise bei 10% (10% der maximalen Luminanz).
Sie können diesen Wert in der erweiterten Registerkarte des "Registrierungs-Einstellungen" Dialog's verändern. Wenn Sie den Wert verringern, wird DeepSkyStacker feinere Sterne erkennen.
Wenn Sie den Wert allerdings anheben, werden nur noch größere Sterne erkannt werden.
Um den besten Wert für Ihre Lightframes herauszufinden, können Sie die Anzahl, der von DeepSkyStacker erkannten Sterne, berechnen lassen. DeepSkyStacker verwendet dazu das erste ausgewählte Lightframe. Durch die zeitweise Aktivierung der Hot-Pixel-Erkennung, können Sie den Unterschied sehr gut einschätzen und den Schwellenwert dementsprechend korrigieren.
Sie sollten allerdings bedenken, dass die Anzahl der damit entdeckten Sterne nur einen Hinweis darstellt. Die tatsächliche Anzahl kann bei der Verwendung von Dark-,
Offset- und Flatframes variieren.
Registrierungsergebnis
Das Registrierungsergebnis (Anzahl der Sterne, Position, Luminanz jedes Stern's)
wird in einer Textdatei gespeichert. Diese Datei trägt den Namen der Bilddatei mit der Datei-Endung .Info.txt.
So ist es nicht nodwendig das Bild erneut zu registrieren, wenn man es zukünftig noch einmal stacken will.
Registrierungsergebnisse und Parameter
Die Registrierungsergebnisse hängen natürlich sehr von den eingestellten Parametern ab (speziell bei den RAW Entwicklungs-Einstellungen).
Wenn Sie an diesen Parametern etwas verändern, müssen Sie das Bild unbedingt erneut registrieren.
Stacken nach der Registrierung
DeepSkyStacker kann das Registrieren und Stacken miteinander verbinden. Dazu müssen Sie nur festlegen, wieviel Prozent der Bilder am Ende eines Registrierungs-Prozesses Sie für das Stacking freigeben wollen. Nur die besten Bilder werden dann zum Stacken verwendet.
Dadurch ist es möglich den kompletten Registrierungs- und Stacking-Prozess zu starten, sich schlafen zu legen und am nächsten Morgen die ersten Ergebnisse zu sehen.
Ausrichtung
Versatz und Winkel-Berechnung
Während des Ausrichtungs-Prozesses wird das beste Bild (das Bild mit dem höchsten Score-Wert)
als Referenzbild verwendet, es sei denn, Sie wählen über das Kontext-Menü ein anderes Referenzbild.
DeepSkyStacker berechnet nun für die anderen Aufnahmen jede Abweichung und Winkeländerung in Bezug zu dem Referenbild.
Der Versatz und der Rotationswinkel für jedes Bild, werden mit Hilfe einer Stern-Identifizierungs-Schablone berechnet.
Ganz einfach ausgedrückt, sucht ein Algorithmus, die größtmöglichen Dreiecke, bei denen die Seitenabstände (und somit die Winkel zwischen den Seiten) am n ächsten sind.
Wenn eine ausreichende Menge dieser Dreiecke zwischen dem Referenzbild und den restlichen auszurichtenden Bildern entdeckt wurde, berechnet DeepSkyStacker daraus den Offset und die Rotation. Mit Hilfe der "kleinsten Quadrat" Methode werden die festgestellten Abweichungen korrigiert.
Abhängig von der Anzahl der entdeckten Sterne, wird dazu die Bisquared- oder Bilineare-Transformation verwendet.
Mehr Informationen über den Algorithmus, der mich zur Verwendung bei DeepSkyStacker inspiriert hat, finden Sie auf den folgenden Seiten:
FOCAS Automatic Catalog Matching Algorithms
Pattern
Matching with Differential Voting and Median Transformation Derivation
Automatische Verwendung der zuvor berechneten Offsets und Winkel
DeepSkyStacker speichert alle relevanten Informationen zur Umwandlung zwischen dem Referenzbild und allen anderen Bildern, sodass man, wenn man die Registrierungs-Einstellungen nicht ändert, das Bild nicht ein zweitesmal registrieren muß.
Diese Info ist in einer Datei mit dem Namen des Referenzbildes (auch im gleichen Ordner) und der Endung.stackinfo.txt gespeichert.
Datei-Gruppen
Datei-Gruppen machen es sehr einfach, sogenannte "mehrere Nächte an dem gleichen Objekt" Bilddateien zu verwalten, indem man logische Gruppen für jede Fotonacht bildet.
Wenn sie nur die Haupt-Gruppe verwenden, arbeitet DeepSkyStacker so, wie vor der Einführung von Datei-Gruppen.
Es gibt zwei Arten von Datei-Gruppen: die Haupt-Gruppe und all die anderen Gruppen.
-
Lightframes der Haupt-Gruppe können nur mit Dark-, Flat- und Offset/Biasframes, die sich ebenfalls in der Haupt-Gruppe befinden, in Verbindung gebracht werden.
Dies ist genau die Arbeitsweise von DeepSkyStacker, vor der Einführung der Datei-Gruppen.
-
Dark-, Flat- und Offset/Biasframes der Haupt-Gruppe können allerdings auch für Lightframes anderer Gruppen verwendet werden.
-
Dark-, Flat- und Offset/Biasframes von anderen Gruppen können nur mit Lightframes der gleichen Gruppe verbunden werden.
Sie können so viele Datei-Gruppen erstellen wie Sie wollen, sollten aber wissen, dass eine Datei immer nur zu einer Datei-Gruppe gehören kann.
Beim Start von DeepSkyStacker ist immer nur die Haupt-Gruppe verfügbar. Sobald Sie aber der letztmöglichen Gruppe eine Datei anfügen, wird sofort eine neue, leere Gruppe erstellt.
Beispiel:
Sie fotografieren das gleiche Objekt zwei Nächte hintereinander.
Von jeder Nacht haben Sie eine Reihe von Light-, Dark- und Flatframes, aber die Außentemperatur war in den Nächten unterschiedlich. Die Darkframes sind also nicht kompatibel, ebenso wie die Flatframes, da die Kamera in jeder Nacht etwas unterschiedlich am OAZ saß.
Um jedes Lightframe mit den passenden Dark und Flatframes zu verbinden, müssen Sie alle Light+Dark+Flatframes der ersten Nacht in eine Datei-Gruppe geben und alle Light+Dark+Flatframes der zweiten Nacht in eine andere Datei-Gruppe.
Nur die Offset/Biasframes waren natürlich in beiden Nächten gleich und kommen somit in die
Haupt-Gruppe.
DeepSkyStacker bringt nun automatisch die Lightframes der ersten Nacht mit den Dark- und Flatframes der ersten Nacht und die Lightframes der zweiten Nacht mit den Dark- und Flatframes der zweiten Nacht zusammen.
Die Offset/Biasframes, die sich in der Haupt-Gruppe befinden, werden mit den Lightframes der ersten und der zweiten Nacht verbunden.
Stacking
Hintergrund-Kalibrierung
Die Hintergrund-Kalibrierung besteht aus einer Normalisierung und Anpassung des Hintergrundwertes für jedes Bild, noch vor dem Stacking-Prozess.
Der Hintergrundwert ist definiert als der Mittelwert aller im Bild befindlichen Pixel.
Zwei Optionen sind verfügbar:
- Mit der Option Pro Kanal
Hintergrund-Kalibrierung wird der Hintergrund des Referenz-Bildes für jeden Kanal separat eingestellt.
- Mit der RGB Kanäle-Kalibrierung werden alle drei Kanäle ( rot,
grün und blau)
jedes Lightframes dem gleichen Hintergrundwert, welcher dem Minimum der drei Medianwerte (einen für jeden Kanal) entspricht, aus dem Referenzframe berechnet und angepasst. Am Anfang der Berechung kompatibler Bilder (Stackweise) erstellt diese Option einen neutralgrauen Hintergrund. Ein Nebeneffekt dieser Anpassung ist, dass die gesamte Sättigung des gestackten Bildes dadurch sehr niedrig wird (sieht wie ein Graustufenbild aus).
Es ist sehr wichtig, eine von den beiden Optionen bei der Verwendung der Kappa-Sigma Clipping oder
Kappa-Sigma Clipping Median-Methode auszuwählen, um zu gewährleisten, dass alle zum Stacken anstehende Bilder den gleichen Hintergrundwert haben.
Automatische Kalibrierung der Flatframes
Der Sinn einer automatischen Kalibrierung der Flatframes liegt darin, bestehende Unterschiede in der Luminanz zwischen den einzelnen Flatframes auszugleichen, bevor daraus ein Master-Flat erstellt wird.
Das erste Flatframe wird dabei als Referenzbild verwendet. Alle anderen Flatframes werden auf die durchschnittliche Luminanz und Dynamik dieses Referenz-Flats angepasst.
Automatische Erkennung und Entfernung von Hot-Pixel
Ziel dieser automatischen Erkennung und Entfernung von Hot-Pixel ist, der Austausch des Hot-Pixels mit einem durchschnittlichen Nachbar-Pixel.
Zuerst werden dazu die Darkframes (oder das Master-Dark, falls vorhanden) analysiert und nach Hot-Pixel durchsucht. Jedes Pixel, dessen Wert größer als
[Median] + 16 x [Standardabweichung] (Sigma) ist, wird als Hot-Pixel markiert.
Die Entfernung der Hot-Pixel besteht dann in einem Austausch der Pixel mit einem Pixel, dessen Wert einem durchschnittlichen (berechneten) Nachbarpixel entspricht.
Automatische Erkennung und Entfernung von fehlerhaften Zeilen
Auf einigen monochromen CCD-Sensoren befinden sich ganze Zeilen, die entweder tot, oder komplett gesättigt (Hot-Pixel Zeilen) sind.
In diesen Fällen sollte die automatische Erkennung und Entfernung von fehlerhaften Zeilen eingesetzt werden.
Sie erkennt automatisch 1 Pixelbreite, vertikale Zeilen, die entweder total übersättigt oder tot sind und verfährt mit ihnen, wie bei der Hot-Pixel-Korrektur. Der Wert jedes fehlerhaften Pixel dieser Zeile, wird mit einem durchschnittlichen (berechneten) Nachbarpixelwert interpoliert.
Auf Entropie basierende Darkframe Subtraktion
Das Subtrahieren der Darkframes kann bei Bedarf optimiert werden, sodass die Entropie des Bildresultats (Lightframe minus Darkframe) durch die Anwendung eines Koeffizienten zwischen 0 und 1 auf das Darkframe minimiert wird.
Der wichtigste Anwendungsbereich dieser Option ist die Verwendung von Darkframes, die nicht unter optimalen Bedingungen entstanden sind (insbesondere in Bezug auf die genaue Temperatur).
Mehr Information über diese Methode können sie hier erfahren (Pdf. Datei in englischer Sprache)
Entropy-Based Dark Frame Subtraction
Stacking-Prozess
Der Stacking-Prozess von DeepSkyStacker ist eigentlich sehr klassisch.
Schritt 1
Erstellung des Master-Offset aus allen Offsetframes (mit der gewählten Methode).
Ist mehr als ein Offsetframe ausgewählt, wird das daraus erstellte Master-Offset unter dem Dateinamen
MasterOffset_ISOxxx.tif (TIFF 8, 16 oder 32 Bit) im Ordner des ersten Offset gespeichert.
In den folgenden Schritten wird nur noch dieses Master-Offset verwendet werden.
Schritt 2
Erstellung des Master-Darks aus allen Darkframes (mit der gewählten Methode). Vor der Erstellung des Master-Dark wird von jedem Darkframe, das zuvor gespeicherte Master-Offset subtrahiert.
Ist mehr als ein Darkframe ausgewählt, wird das daraus erstellte Master-Dark unter dem Dateinamen MasterDark_ISOxxx_yyys.tif (TIFF 8, 16 oder 32 Bit) im Ordner des ersten Darkframes gespeichert.
In den folgenden Schritten wird nur noch dieses Master-Dark verwendet werden.
Erstellung des Master-Dark Flat aus allen Dark-Flatframes (mit der gewählten Methode). Vor der Erstellung des Master-Dark Flat wird von jedem Dark-Flatframe, das zuvor gespeicherte Master-Offset subtrahiert.
Ist mehr als ein Dark-Flatframe ausgewählt, wird das daraus erstellte Master-Dark Flat unter dem Dateinamen MasterDarkFlat_ISOxxx_yyys.tif (TIFF 8, 16 oder 32 Bit) im Ordner des ersten Dark-Flatframes gespeichert.
In den folgenden Schritten wird nur noch dieses Master-Dark Flat verwendet werden.
Schritt 3
Erstellung des Master-Flat aus allen Flatframes (mit der gewählten Methode). Vor der Erstellung des Master-Flat, wird von jedem Flatframe das zuvor gespeicherte Master-Offset und Master Dark Flat subtrahiert. Das Master-Flat ist automatisch kalibriert.
Ist mehr als ein Flatframe ausgewählt, wird das daraus erstellte Master-Flat unter dem Dateinamen MasterFlat_ISOxxx.tif (TIFF 8, 16 oder 32 Bit) im Ordner des ersten Flatframes gespeichert.
In den folgenden Schritten wird nur noch dieses Master-Flat verwendet werden.
Schritt 4
Berechnung des Offsets (Versatz) und der Rotation aller Lightframes, die gestackt werden sollen.
Schritt 5
Erstellung des fertigen Bildes durch Addition aller Lightframes (mit der gewählten Methode).
Das Master-Offset und das Master-Dark werden dabei automatisch von jedem Lightframe abgezogen und das Resultat durch das kalibrierte Master-Flat geteilt. Dann werden, wenn diese Option ausgewählt wurde, die im Darkframe erkannten Hot-Pixel entfernt und mit dem aus den Nachbarpixel interpolierten Wert ersetzt.
Schritt 6
Wenn die Funktion Bayer Drizzle aktiviert ist, werden die drei RGB Komponenten zur Vermeidung von Informations-Fehlstellen normalisiert.
Schritt 7
Das fertige Bild wird automatisch im Ordner des ersten Lightframe als AutoSave.tif Datei gespeichert.
Ausrichtung der RGB Kanäle
Wenn Sie diese Option ausgewählt haben, versucht DeepSkyStacker die drei Farb-Kanäle gegeneinander auszurichten, um eine Farbverschiebung im fertigen Bild zu reduzieren.
Der daraus resultierende Haupteffekt ist, dass die Sterne nicht mehr an einer Seite rot und an der anderen Seite blau sind.
Jeder Kanal wird dabei registriert (Sterne werden erkannt), damit eine Umwandlung zwischen dem besten und den beiden anderen Kanälen berechnet werden kann.
In der Umwandlungsphase werden nun die beiden als nicht so perfekt eingestuften Kanäle auf den besten Kanal ausgerichtet.
Automatische Verwendung zuvor erstellter Master-Dateien
Vorhandene Master-Dateien (Dark, Bias, Flat und Dark Flat) die in einer Dateiliste erstellt wurden, werden automatisch solange wie möglich verwendet werden, wenn:
- Die Dateiliste sich nicht verändert hat.
- Die Einstellungen zum Erstellen nicht modifiziert wurden. Dies beinhaltet auch die Auswahl der Kombinations-Methode, die eingestellten Parameter und die RAW bzw. FITTS DDP- Einstellungen bei der Verwendung von RAW oder FITS Dateien.
Eine Text-Datei, die alle Angaben, Parameter und die Auflistung der verwendeten Dateilisten zum Erstellen des fertigen Bildes enthält, ist im Ordner des fertigen Bildes gespeichert.
Die Datei hat den Namen des fertigen Bildes mit dem Dateianhang .Description.txt.
Wenn die Beschreibung in dieser Datei mit eventuell neuen Einstellungen nicht übereinstimmt, werden automatisch wieder neue Master-Dateien erstellt.
Dieses Feature ist hauptsächlich für Anwender, die eine schnelle Verarbeitung mit unveränderten Master-Dateien ausführen wollen.
Verwendung des Auswahlrechtecks
Sie können DeepSkyStacker mit Hilfe eines Auswahlrechtecks die gewünschte Größe und Position des fertigen Bildes (Endresultat) angeben.
Zuerst brauchen Sie natürlich ein Vorschaubild, das Sie in der Dateiliste auswählen und mit einem Klick öffnen. Sie können irgendein Lightframes auswählen, aber wenn Sie mit dem Auswahlrechteck den Bereich auswählen, der das spätere, fertige Bild zeigt, sollten Sie besser das Referenz-Lightframe verwenden (das mit dem höchsten Score-Wert, oder das, welches Sie selbst als Referenz-Lightframe mit dem Kontextmenü ausgewählt haben).
Dann müssen Sie nur noch, mit gedrückter linker Maustaste, ein Auswahlrechteck in gewünschter Größe aufziehen. Dieses Rechteck lässt sich natürlich frei auf dem Bild verschieben.
Wenn Sie nun den Stacking-Prozess starten, verwendet DeepSkyStacker standardmäßig dieses erstellte Rechteck. Sie brauchen dies nicht irgendwo nocheinmal auszuwählen.
Diese Option ist sehr hilfreich, wenn Sie bei ausgewählter
Drizzle Option, die ja das fertige Bild verdoppelt bzw. verdreifacht, den benötigten Arbeitsspeicher beim Stacking-Prozess und den benötigten Speicherplatz auf der Festplatte verringern wollen.
Bei der Verwendung des Auswahlrechtecks benötigt DeepSkyStacker nur den Arbeitsspeicher und Festplattenplatz für ein Bild in der Größe des Rechtecks. Die außerhalb befindlichen Bildpartien werden in den Berechnungsprozess nicht mit eingebunden.
Stacking Methoden
Durchschnitt
Dies ist eine einfache Methode. Der Durchschnittswert für alle im Stack befindlichen Pixel wird für jedes Pixel berechnet.
Median
Dies ist die Standard-Methode beim Erstellen des Master-Dark, Flat und
Offset/Bias. Der Mittelwert für alle im im Stack befindlichen Pixel wird für jedes Pixel berechnet.
Maximum
Dies ist eine extrem einfache Methode, die mit größter Sorgfalt angewendet werden sollte. Es wird dabei der Maximalwert aller im Stack befindlichen Pixel für jedes Pixel berechnet.
Diese Methode kann ganz sinnvoll sein, wenn man herausfinden will, was an einem Stack schiefgelaufen ist, da man alle Defekte der kalibrierten Bilder damit sichtbar macht.
Kappa-Sigma Clipping
Diese Methode wird verwendet, um abweichende Pixel iterativ auszusondern.
Dazu werden zwei Parameter gesetzt: Die Anzahl der Iterationen (Wiederholungen) und der Multiplikationsfaktor (Kappa), mit dem die Standard-Abweichung (Sigma) multipliziert wird.
Bei jeder der eingestellten Wiederholungen wird erneut die Standard-Abweichung (Sigma) der Pixel im Stack berechnet.
Jedes Pixel, dessen Wert dabei am weitesten von dem errechneten Wert (Kappa * Sigma) entfernt ist, wird ausgesondert.
Der Mittelwert der Pixel, auf das sich die Sigma-Abweichung bezieht, wird aus den verbliebenen Pixel des Stacks berechnet.
Median Kappa-Sigma Clipping
Diese Methode ist ähnlich wie die Kappa-Sigma Clipping-Methode, aber anstatt die Pixel, deren Werte nicht stimmen, auszusondern, werden sie durch Pixel mittleren Wertes ersetzt.
Auto Adaptive Weighted
Average
Die Weighted Average-Methode (gewichteter Durchschnitt) ist eine Anlehnung an die Arbeit von Stetson (see
Artificial Skepticism - Stetson 1989 Pdf. Datei in englischer Sprache).
Diese Methode berechnet einen robusten Durchschnitt. Diesen Durchschnitt erhält sie mit einer iterativen Gewichtung der Abweichung jedes Pixel vom Mittelwert zur vergleichsweisen Standard-Abweichung.
Entropy Weighted Average (High Dynamic Range)
Diese Methode basiert auf der Arbeit von German, Jenkin und Lesperance (see
Entropy-Based image merging - 2005 in englischer Sprache). Sie wird verwendet um beim Stacken jedem Pixel die beste Dynamik zu geben.
Sie ist besonders nützlich beim Stacken von Bildern mit unterschiedlichen Belichtungszeiten oder ISO Werten, da somit ein Bild ensteht, das die bestmögliche Dynamik aufweist. So ist es sehr einfach, ausgebrannte Galaxienkerne oder Nebel-Zentren (z.B M42) zu vermeiden.
Hinweis: Diese Methode ist sehr CPU- und speicherintensiv.
Drizzle
Drizzle ist eine von der NASA entwickelte Methode für die
Hubble Deep Field Observations des Hubble Space Telescope.
Dieser Berechnungs-Algorithmus ist auch bekannt unter dem Namen Variable Pixel Linear Reconstruction.
Es verfügt über eine breite Palette von Möglichkeiten, mit denen die Auflösung eines gestackten Bildes, im Vergleich zu den verwendeten Einzelbildern enorm verbessert wird, während die eigentlichen Eigenschaften des Bildes (Farbe, Helligkeit usw.) erhalten bleiben.
|
Grundsätzlich wird dabei jedes Bild unmittelbar vor dem Stacking-Prozess abgetastet, zwei bis dreifach vergrößert (möglich wäre jeder Wert größer als 1, aber DeepSkyStacker gibt nur die Möglichkeit 2x oder 3x als verfügbaren Wert vor) und dann auf ein feineres Pixelraster projeziert.
Als Folge davon wird sich die Größe des fertigen Bildes verdoppeln (oder verdreifachen) und kleine Details im Bild, die vorher nur ein paar Dutzend Pixel bedeckten, nun die zwei oder dreifache Menge an Pixel abdecken. Durch die Verteilung der Details auf mehr Pixel, wird auch die Nachbearbeitung des Bildes erleichtert. |
 |
|
Wie und wann verwendet man die Drizzle-Option
Im Grunde brauchen Sie nur eine Menge Bilder, die noch nicht einmal perfekt ausgerichtet sein müssen (ein paar Pixel Drift ist genug).
Es macht keinen Sinn, die Drizzle-Funktion anzuwenden, wenn Sie nur ein paar Lightframes haben.
Drizzling ist besonders gut zur Verbesserung der Auflösung und somit ideal, wenn Sie ein relativ kleines Objekt mit kurzer Brennweite aufgenommen haben.
Rechts sehen Sie ein Beispiel eines fast unbearbeiteten M57 (Aufgenommen mit einem 10", F/D
4.72 OTA und einer Canon DSLR).
Normalerweise ist M57 dann sehr klein abgebildet. Aber mit der 2x Drizzle-Funktion und ca. 100 Lightframes ist das fertige Bild zweimal so groß (4x soviel Fläche?) und zeigt eine erheblich bessere Auflösung.
Fahren Sie mit der Maus über diese Links und sehen Sie selbst.
unbearbeiteter M57 - ohne Drizzle (4-fach vergrößert)
unbearbeiteter M57 - 2x Drizzle (2-fach vergrößert) |

M57 - ohne Drizzle |
Nebeneffekte des Drizzling
Der Haupt-Nebeneffekt ist, dass der benötigte Arbeitsspeicher und Festplattenplatz zum Erstellen und Verarbeiten von Drizzle-Bildern um das Quadrat des Drizzling-Faktors (2-fach Drizzling =2x2 =4 fach) ansteigt. Dass dadurch natürlich auch die benötigte Zeit zum Verarbeiten um den gleichen Faktor ansteigt, sollte man auch unbedingt vorher bedenken.
Beispiel: Bei der Verwendung von 2x Drizzle mit einem 3000x2000 Pixel großen Bild, werden Sie als Ergebnis ein Bild in der Größe von 6000x4000 Pixel erhalten, welches den 4-fachen Arbeitsspeicher und Festplattenplatz benötigt und natürlich eine erheblich längere Zeit zum Erstellen benötigt.
Wenn Sie die 3x Drizzle Option verwenden, benötigen Sie schon 9x soviel Speicher- und Festplattenplatz (3 im Quadrat). Sollten Sie die Verarbeitung nicht auf einem wirklich super leistungsfähigen Computer mit sehr viel Arbeitsspeicher und großer Festplatte ausführen, kann ich Ihnen nur abraten, die 3x Drizzle Option bei DSLR Bildern anzuwenden.
Bei der Verarbeitung von kleinen Bildern (wie bei den ersten DSI und LPI
Kameras), kann die 3x Drizzle Funktion die Auflösung allerdings sehr verbessern.
Ein guter Weg, den benötigten Speicher- und Festplattenplatz bei der Drizzle-Option zu reduzieren, ist die Verwendung eines Auswahlrechtecks.
Drizzle und Bayer Drizzle
Obwohl es zwei Drizze-Methoden in DeepSkyStacker gibt (Drizzle + Bayer-Drizzle), ist es nicht empfehlenswert beide Methoden gleichzeitig zu verwenden.
Wenn Sie versehentlich doch einmal beide Methoden ausgewählt haben, wird Ihnen DeepSkyStacker eine Warnmeldung einblenden.
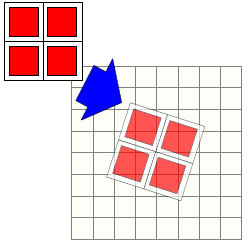
Kometen Stacking
Kometen sind sehr schnelle Objekte. Wenn sie eine Serie Kometenbilder stacken, können zwei Dinge passieren:
- Wenn die Ausrichtung zwischen den Bildern sich an den Sternen orientiert, wird der Komet neben den punktförmigen Sternen sehr unscharf abgebildet.
- Wenn die Ausrichtung zwischen den Bildern sich am Kometen orientiert, wird der Komet scharf abgebildet, inmitten von Sternen die als Strichspuren erscheinen.
Mit Beginn der DeepSkyStacker Version 3.0 kamen zwei Komet-Stacking Optionen dazu:
- Bilderstellung mit Ausrichtung auf den Kometen, mit Sternen als Strichspuren.
- Bilderstellung mit Ausrichtung auf den Kometen und auf die Sterne, mit scharfer Abbildung von Komet und Sternen.
Auf dem rechten Bild sehen Sie ein Beispiel der unterschiedlichen Komet-Stacking Methoden (Maus über die blaue Schrift bewegen zeigt das Ergebnis)
|
Standard Stacking
Die Kometenposition wird ignoriert.
Der Komet ist unscharf, die Sterne scharf.
Komet-Stacking : mit Sternstrichspuren
Es wir auf den Komet ausgerichtet.
Die Sternpositionen werden zur Berechnung der Feldrotation verwendet, um den Komet scharf und die Sterne als Strichspuren abzubilden.
Komet- und Stern-Stacking : "Star Freeze" Effekt
Die Kometenposition wird erfasst.
In einem ersten Stackvorgang wird der genau erfasste Komet aus dem Hintergrund extrahiert.
Im zweiten Stackvorgang wird auf die Sterne ausgerichtet. Der Komet ist aus jedem dieser kalibrierten und registrierten Lightframes bereits rausgerechnet, bevor gestackt wird.
Zuletzt werden die zwei Bilder der Stacks zu einem Bild zusammengerechnet, wobei der Komet nun gemeinsam mit den Sternen scharf abgebildet wird.
|
 |
Wenn Sie vorhaben Ihre Kometenbilder nur auf die Sterne auszurichten (Standard-Stacking), brauchen Sie das, was in den folgenden Absätzen beschrieben wird nicht zu befolgen, da Sie ja die Standard-Methode verwenden.
Was Sie tun müssen
Schritt 1: Festlegen des Kometenzentrums
DeepSkyStacker kann das Zentrum des Kometen in den Lightframes nicht automatisch bestimmen.
Zuerst müssen Sie den Kometen in allen Lightframes festlegen. Dies brauchen Sie aber nur einmal zu tun.
Dazu öffnen Sie ein Lightframe aus der Liste und verwenden den Edit Comet Mode um das Kometenzentrum zu markieren.
Wenn das Zentrum des Kometen zu schwach oder zu hell ist, können Sie DeepSkyStacker dazu zwingen, Ihre Positionsangabe zu akzeptieren, wenn Sie beim Markieren die Umschalttaste festhalten.
Dann speichern Sie das Resultat mit einem Klick auf den "Änderungen speichern" Button (Diskettensymbol) in der Toolbar.
Damit Sie den Speichervorgang nicht vergessen, werden Sie von DeepSkyStacker danach gefragt. In dieser Dialogbox können Sie dann auch, wenn gewünscht einstellen, dass die Änderungen zukünftig automatisch, ohne Nachfrage gespeichert werden.
Sobald Sie die Kometenposition festgelegt und gespeichert haben, sehen Sie in der Spalte "Sterne" der Bilderliste ein +(C) vor der Sternanzahl des ausgewählten Bildes.
Diesen Vorgang müssen Sie für jedes Lightframe wiederholen.
Tipp
Wenn die Bildinfo ein genaues Datum+Uhrzeit der Aufnahme enthält (bei Verwendung von
DSLRs und einigen CCD Kameras) können Sie die Bilder nach Datum/Uhrzeit sortieren, bevor Sie in dem Ersten-, dem Letzten- und dem Referenzframe (das mit dem höchsten Score-Wert, wenn Sie nicht ein anderes mit dem Kontextmenü als Referenzframe festgelegt hatten) die Kometenposition festlegen.
DeepSkyStacker errechnet nun automatisch (kurz vor dem Stacking) die Position des Kometen für alle dazwischenliegende Lightframes, bei denen das Kometenzentrum nicht festgelegt wurde.
Dazu berechnet DeepSkyStacker die zwischen den markierten Aufnahmen verstrichene Zeit, um daraus die Kometenposition für jedes Lightframe zu interpolieren. |
Schritt 2: Stacking-Modus festlegen
Den Stacking-Modus können Sie im Register "Komet" des Stacking-Parameter Dialogs festlegen.
Das Register "Komet" in den Stacking-Parameter ist nur dann sichtbar, wenn mindestens zwei Lightframes (inclusive desReferenz-Lightframes) eine registrierte Kometenposition haben (+(c)).
In diesem Register können Sie einen Komet Stacking-Modus aus den drei angebotenen auswählen.
Mischung aus Bildern mit und ohne Komet
DeepSkyStacker kann Lightframes mit einem registrierten Kometen und ohne einen registrierten Kometen im gleichen Stack verarbeiten.
Dies kann dann interessant sein, wenn Sie nur wenige Kometenaufnahmen haben und den SNR Wert erhöhen wollen, damit man feinere Details im Hintergrund besser erkennen kann (z.B. ein Komet passiert einen Nebel oder eine Galaxie, die Sie auch ablichten wollen).
Welche Stacking-Methode?
Wenn Sie Kometenbilder mit Stern-Strichspuren erstellen, sollten Sie die Durchschnitt Stacking-Methode verwenden.
In allen anderen Fällen sollten sie die Median (bei kleinen Stacks) oder die Kappa-Sigma (bei großen Stacks) Stacking-Methode verwenden.
Welche Ergebnisse erwarten Sie
Der anspruchsvollste Algorithmus ist der "Komet- und Stern-Stacking" Modus mit dem "Star Freeze" Effekt.
Sehr langsame Kometen können dazu führen, dass andere Objekte, wie helle Sterne und große Objekte schlechter erkannt werden. In diesem Fall wird der Prozess zum Extrahieren des Kometen nicht so perfekt ausfallen.
Egal, welche Methode Sie verwenden, wenn Sie die Möglichkeit haben von der gleichen Himmelsregion Aufnahmen ohne Komet
(ein paar Tage vorher oder nachher) in die Kometenbilder einzufügen, werden Sie das Endresultat erheblich verbessern.
RAW Bilder Entwicklungsprozess
RAW-Dateien Dekodierung
RAW-Dateien, die mit DSLRs erstellt wurden, werden mit
DCRAW von Dave Coffin dekodiert.
Die Liste der zur Zeit unterstützten DSLRs, ist mitlerweile sehr lang geworden und wird ständig von Dave Coffin aktualisiert. DeepSkyStacker verwendet zum Dekodieren immer die neueste Version von DCRAW, die regelmäßig aktualisiert wird.
RAW-Dateien Entwicklungs-Prozess
Eine Datei ist in diesem Falle das Äquivalent eines "digitalen Negativs". Das bedeutet, dass jedes RAW "Negativ" auch entwickelt werden muß.
Es gibt zwei Arten von RAW-Dateien: Die einen verwenden eine Bayer-Matrix (die meisten von ihnen) und die anderen brauchen keine Bayer-Matrix (wenn Sie z.B. einen Foveon-Chip benutzen).
Die folgenden Erläuterungen beziehen sich ausnahmslos auf die RAW-Dateien, die mit einer DSLR erstellt wurden und somit eine Bayer-Matrix verwenden.
Bayer
Matrix
Zunächt einmal zur Erinnerung: Was ist überhaupt eine Bayer-Matrix?
Wenn Sie eine 8 Megapixel DSLR verwenden, enthält diese einen Schwarz-Weiß CMOS oder CCD Chip mit 8 Megapixel, auf denen eine Bayer-Matrix aufgeklebt wurde. Diese Bayer-Matrix ist nichts anderes, als winzig kleine Farbfilter (RGBG oder CYMK) in bestimmter Anordnung vor jedem Pixel.
Im Falle eines RGBG Filtermusters sehen ein Viertel der Pixel nur rot, ein Viertel nur blau
und die Hälfte der Pixel nur grün.
Also produziert Ihre 8 Megapixel DSLR Bilder, mit 2 Millionen roten Pixel, 2 Millionen blauen Pixel und 4 Millionen grünen Pixel.
Wie kann also die DSLR "echte" Farbbilder erstellen?
Sehr einfach, indem sie die fehlenden Primärfarben aus den benachbarten Pixel interpoliert. Interpolation ist hier also das Zauberwort. Das große Farbspektrum einer DSLR wird also aus diesen Farbpixel errechnet. Wo gerechnet wird, hat man immer die Möglichkeit verschiedene Rechenvarianten einzusetzen.
Farb-Rekonstruktion mit Verwendung einer Bayer-Matrix -
Interpolation
|
Der erste Weg, die fehlenden Farben der Bayer-Matrix zu rekonstruieren besteht in der Interpolation der Nachbarpixel.
Es stehen eine Menge unterschiedlicher Interpolations-Methoden zur Verfügung, die mehr schlechte als rechte Ergebnisse produzieren (Linear, Gradient...), aber alle haben eines gemeinsam: Sie setzen die Qualität des fertigen Bildes dadurch herab, dass sie eigentlich nicht wissen können, wie die fehlenden Farben genau aussehen sollen. Hier ist natürlich Interpretationspielraum gegeben.
Jedes Bild wird durch den Interpolationsvorgang an Schärfe verlieren. Beim Stacking-Prozess werden die übereinander gelegten "leicht unscharfen" Bilder somit eine Menge an feinen Details nicht mehr so genau abbilden.
Wenn Sie vorhaben, eine Interpolations-Methode zu verwenden, sollten Sie wissen, dass die mit Ihrer DSLR mitgelieferte Software wahrscheinlich die schlechteste Wahl ist, wenn es um den Erhalt der Qualität von so etwas Speziellem wie Astrobildern geht.
Wenn Sie diese Software zum Umwandeln Ihrer RAW-Dateien in 16 Bit TIFF-Dateien verwenden und zum Vergleich die selbe Umwandlung in DeepSkyStacker durchführen, werden Sie augenblicklich den Unterschied feststellen.
|
 |
Farb-Rekonstruktion mit Verwendung einer Bayer-Matrix -
Super-Pixel
|
Mit DCRaw ist es möglich auf die Bayer-Matrix zuzugreifen, noch bevor eine Interpolation stattgefunden hat. So ist es möglich, ganz andere Methoden zur Rekonstruktion der echten Farben anzuwenden, als die Primärfarben per Interpolation zu erraten.
Die Super Pixel-Methode verzichtet auf Interpolation und erstellt stattdessen ein Super-Pixel aus jeder Pixel-Vierergruppe (RGBG).
Jede dieser Vierergruppen enthält alle Informationen über die Primärfarbe und die Luminanz, die benötigt werden.
Diese Methode ist wirklich einfach, hat aber den Nachteil (oder Vorteil?), dass die Bildgröße des Endresultats dadurch nur noch ein viertel so groß ist.
Die Super-Pixel Methode führt zu sehr guten Resultaten, wenn nur wenige Aufnahmen zum Stacken zur Verfügung stehen.
|
 |
Farb-Rekonstruktion mit Verwendung einer Bayer-Matrix - Bayer Drizzle
|
Die letzte Methode, die von Dave Coffin empfohlen wird, nutzt die Eigenschaft des Stacking-Prozesses, die "natürliche" Pixel-Drift, zwischen den einzelnen Aufnahmen, um die wahren RGB Werte daraus zu errechnen.
Wenn eine große Anzahl von Aufnahmen verfügbar ist, und diese subpixelgenau ausgerichtet werden, errechnet DeepSkyStacker Bit für Bit die echten Farbwerte jeden Pixels, ohne Interpolation.
Nach dem Stacking-Prozess sorgt ein anderer Algorithmus für eine Normalisierung der RGB Werte, um Fehlstellen in der Information zu vermeiden.
Die Bayer Drizzle-Methode führt zu hervorragenden Ergebnissen, wenn eine große Anzahl von Lightframes zur Verfügung steht und wenn die Guiding-Präzision über einem Pixel liegt (was eigentlich immer der Fall ist). |
 |